Tom Judd <<<>>> Perspectives
No-Script users allow www.juddzone.com
Privacy Badger users allow www.w3schools.com or disable Privacy Badger for this site
I took this picture of Rafa at Christmas 2015, just after I got my iPhone. It is the first picture I took with it.

Map from 2016 Sierra Hike to SeaGull Island
The shape of the island in the middle of the lake reminds me of a seagull. I first noticed this curiosity more than two decades ago. I thought I might one day want to visit it. So I did.
To see the track for the hike go to my Track page and select '2016 Taboose'.
I have been pulling my hair out trying to manage the map displays at this site. I have tried Google, Gmap4, and CalTopo. Google torpedoed Gmap4, and CalTopo changed their interface. I hate re-doing stuff as much as I hate re-inventing something that already works. But depending on other sources has led to too much rewriting. I finally decided to roll my own.
The Track page can display two versions of the topo maps, and two versions of the satellite maps, and the OpenStreetMap maps. The USGS topo has been slow in the past. I prefer the ESRI topo because it uses the scanned paper maps which have better feature name information. It does not zoom in as far though. The two satellite maps help resolve display problems when one of the sources is deficient (e.g. everything under snow).
I include the KML file so you can download it and display it in the application of your choice.
Download KML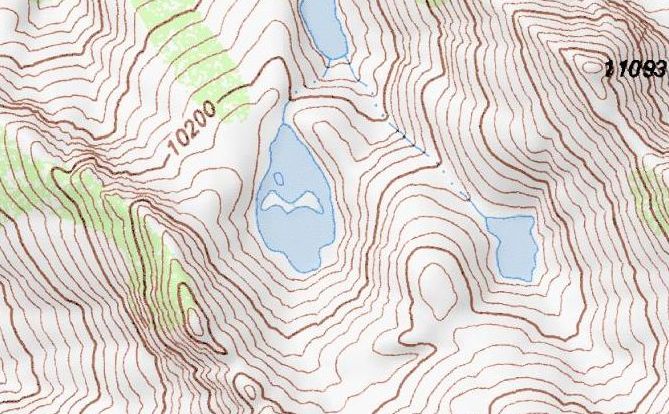
Here is a view of Sea Gull island with the west wing in the foreground. During the late summer--early fall, the water level is at its lowest. That makes getting to the island fairly easy. I changed to shorts and sandals and waded across with my hiking pole for support. The water came up to my crotch but no more. I spent an hour exploring the island.
Just after I turned around, while still on the east wing, I was surprised to find the remains of a blue helium party balloon. The island marked the furthest point of my trip deep into the back country. It seemed odd that I would find an accidental piece of human activity so far from everything else.

©2022 Tom Judd
www.juddzone.com
Carlsbad, CA
USA